APP功能设置
首先打开APP,点击机器人图标连接机器人。进入机器人控制界面后,点击右上角的设置按钮。APP会弹出一个列表。如下图所示
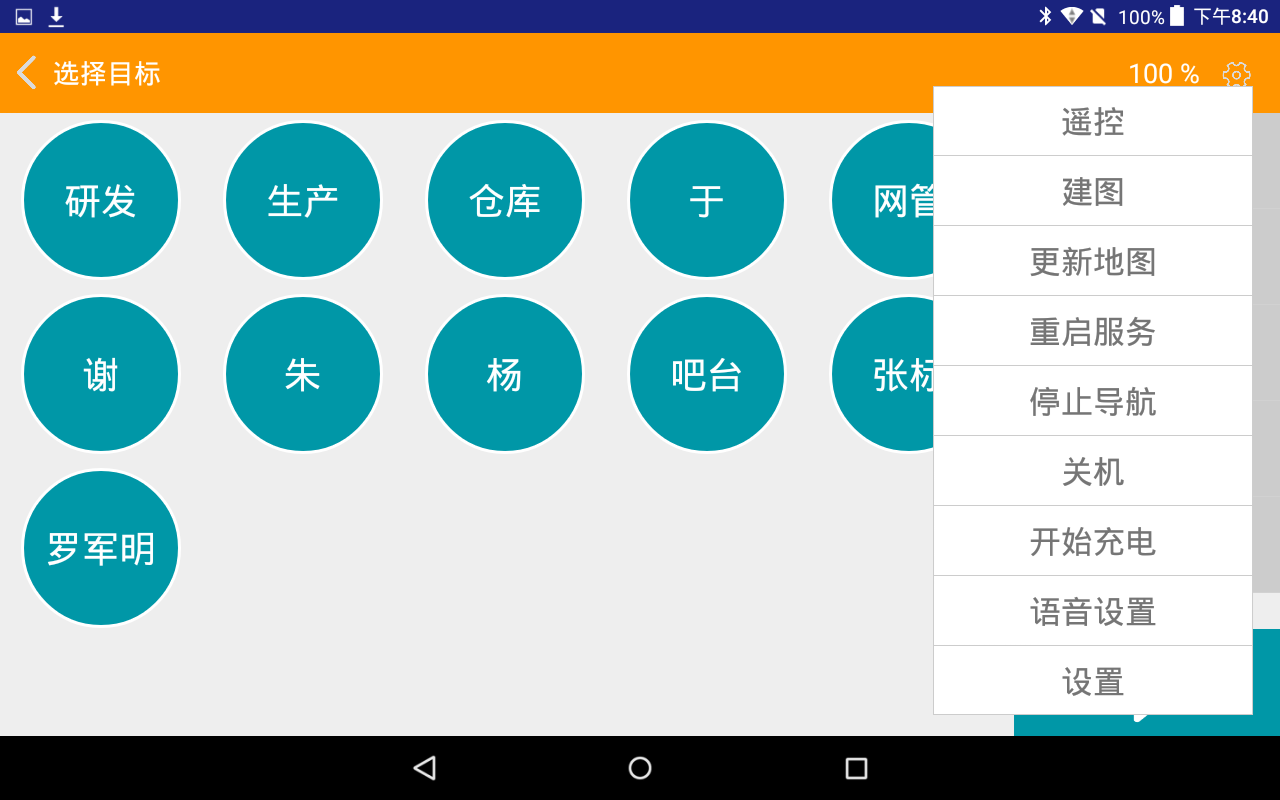
点击最下面的设置选项即可进入APP设置界面。如下图所示

通过设置可以改变APP的默认行为。
开启迎宾模式
开启后当有人走过机器人前面时,机器人会说欢迎光临
自动连接机器人
开启后当局域网中只有一个机器人时,打开APP后APP会自动连接机器人
自动开启导航
开启后APP连接机器人后自动开启机器人导航程序
开启循环
开启后APP会控制机器人循环遍历所有导航点,一般用于巡逻模式
显示表情
开启后机器人在待机和导航状态下会在APP中显示表情视频
开启多层
开启后,在送餐的时候可以选择每桌的层号。比如1号桌取第一层,2号桌取第二层等等。机器人在达到餐桌时也会提醒用户取对应的层号。
总层数
餐盘的层数,最多为5层
显示所有点
有些情况下用户可能会希望跳过某些桌号,比如4号,13号桌。这时可以把对应桌号的名称改为drop。重新进入机器人控制界面后,这些桌号将不再显示。如果想要再次显示,就可以开启此处的显示所有点选项。
服务机器人模式
在服务机器人模式下,机器人到达对应目标点会语音提示xx号桌到了。同时任务执行完成之后机器人会自动返回0号点,也就是厨房的位置。对于AGV或者展览引导机器人等应用场景,这种行为是不需要的。此时就可以关闭服务器机器人模式选项。关闭之后机器人在到达目标点后会提示xx点到了,同时任务执行完成后不再返回厨房位置。
多地图模式
在多地图模式下机器人可以在多个地图间自由导航。同时目标点选择界面也会同时显示多个地图的目标点。 多地图模式下厨房的设置也发生了变换。在单地图导航下,默认采用0号点作为厨房。由于多个地图存在多个0号点,所以多地图不能采用这种方式设置厨房位置。多地图需要手动修改厨房点的名字为厨房。同时也没有了点的序号限制。任意设置名称为厨房的点都可以作为厨房。此功能在单地图导航也是可以使用的。 注意多地图模式要求机器人版本6.1.5以上,同时用户需要在客户端上对地图进行相关设置。详情可以参考这里